The software package «Solids Bodies and Liquids Mechanics» includes 10 virtual laboratory works from the general physics course for students of higher and secondary educational institutions.
List of virtual labs:
1. Hooke’s Law 2. First- and Second-Class Levers 3. Parallelogram of Forces 4. Inclined Plane 5. Static and Dynamic Friction 6. Bending of Flat Beams 7. Torsion on Cylindrical Rods 8. Falling Sphere Viscosimeter 9. Surface Tension 10. Archimedes’ Principle
Target computing device type and platform supported: IBM-compatible personal computer running Microsoft Windows.
Additionally, the package includes a web version of the virtual laboratory (HTML-5 platform), designed to be uploaded to the server of an educational organization in order to conduct remote classes with students.
The graphics component of the software uses the OpenGL 2.0 component base. The graphical user interface of the program is implemented in English.
Minimum System Requirements
Processor clock speed: at least 2 GHz
RAM: at least 4 GB
Video memory: at least 512 MB
Screen resolution: at least 1024x768x32
OpenGL version 2.0 support
DirectX version 9.0.c support (for Windows)
Standard keyboard and computer mouse with scroll wheel (for PC)
Audio playback devices (audio speakers or headphones)
To work with the web version of the virtual laboratory, you must use a web browser that supports WebGL 3D graphics, for example, Google Chrome, Microsoft Edge, Opera, Mozilla Firefox. The HTML components of the web version must be uploaded to a physical server. If you need to use a local server, it is recommended to use the XAMPP (Apache) assembly.
Types of Licensing
The Virtual Lab is supplied only for educational organizations with installation on an unlimited number of places (corporate license).
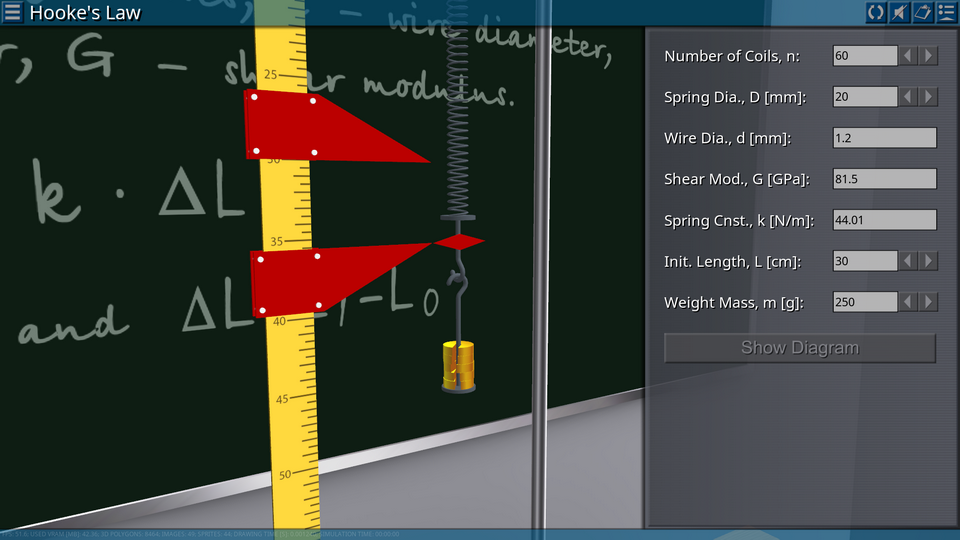
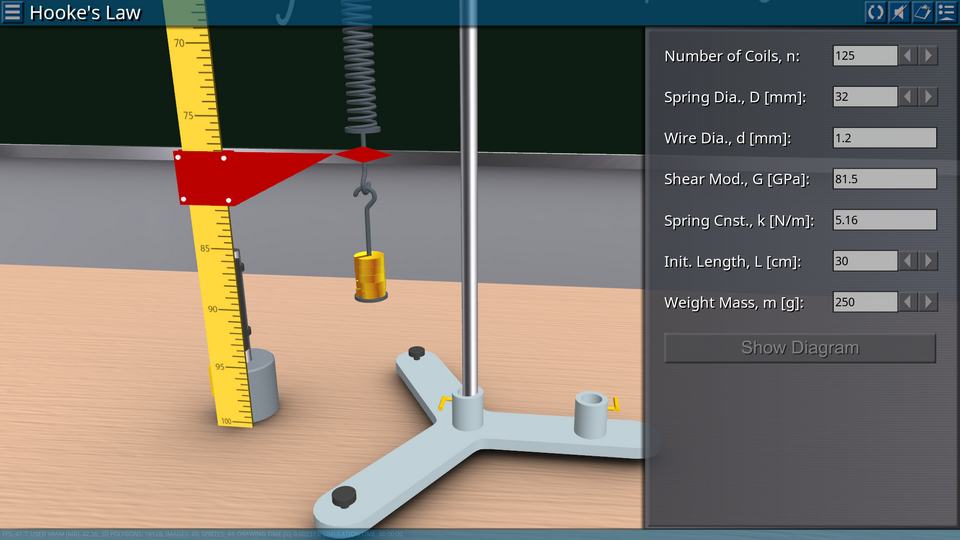
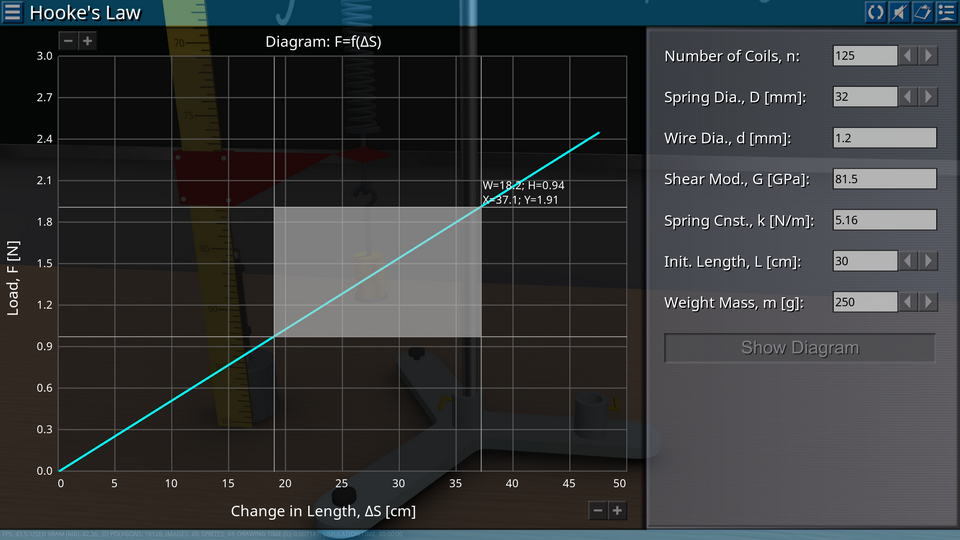
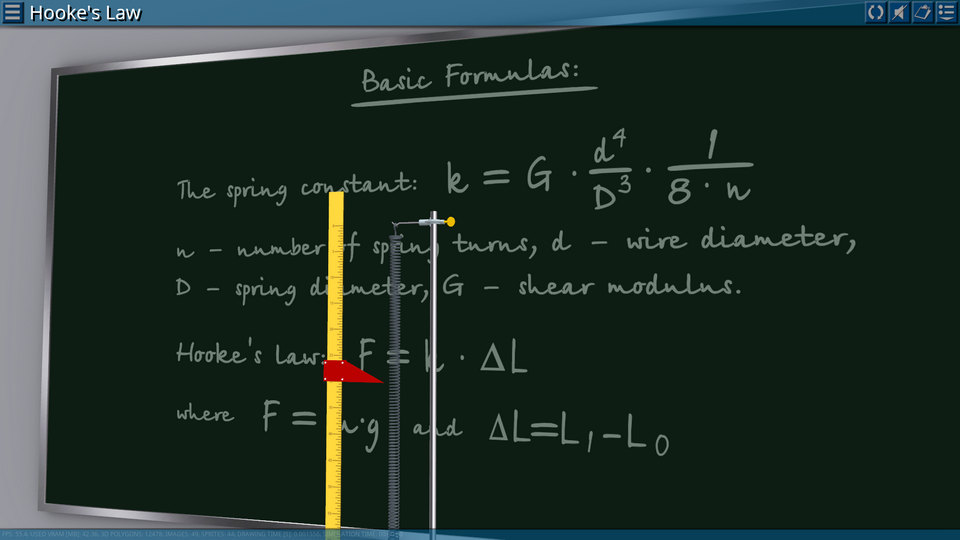
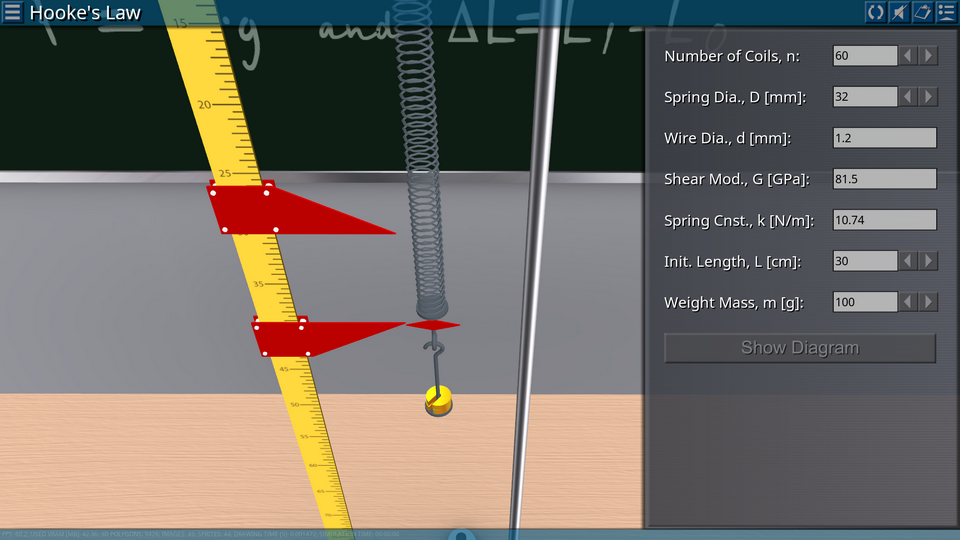
1. Hooke's Law
Goals: confirmation of Hooke’s law and determination of spring constant for various parameters; comparing the measured spring constant with the theoretically calculated value.
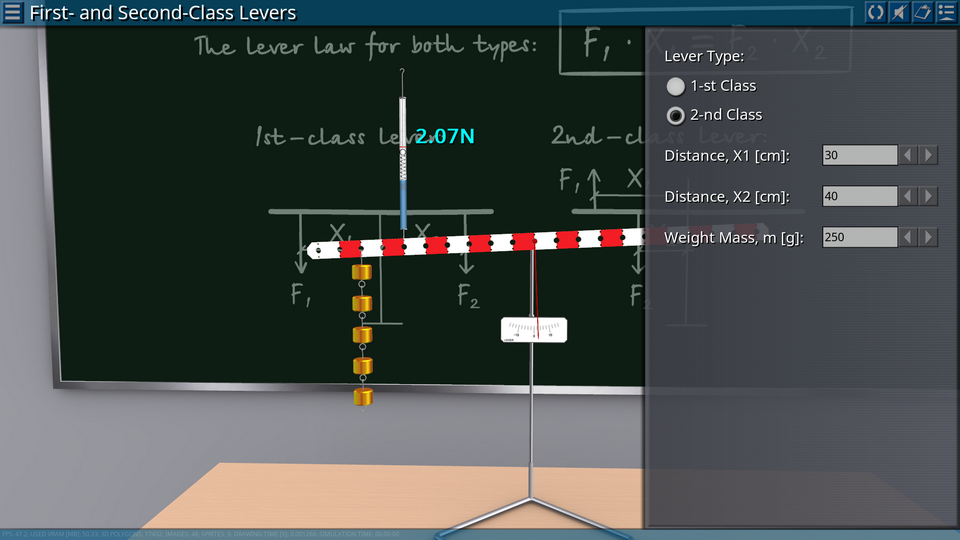
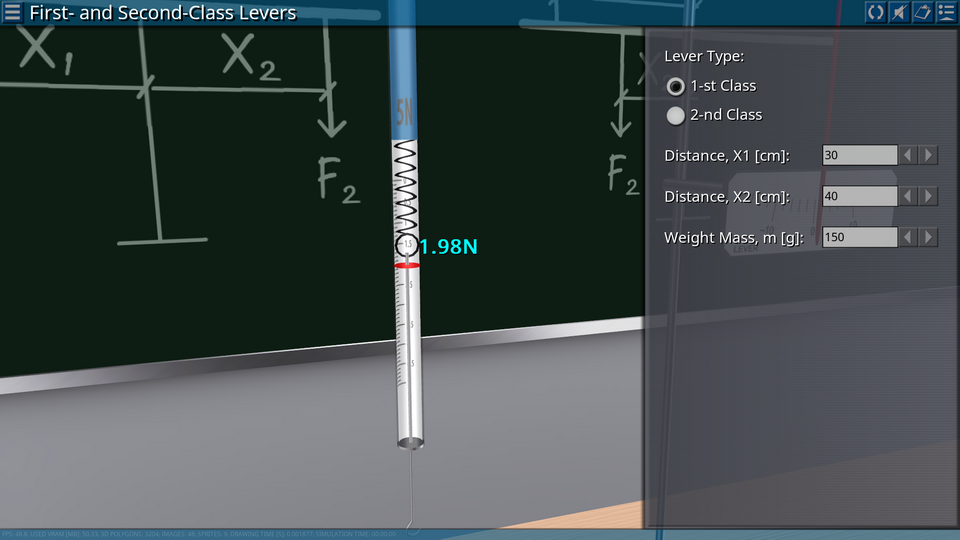
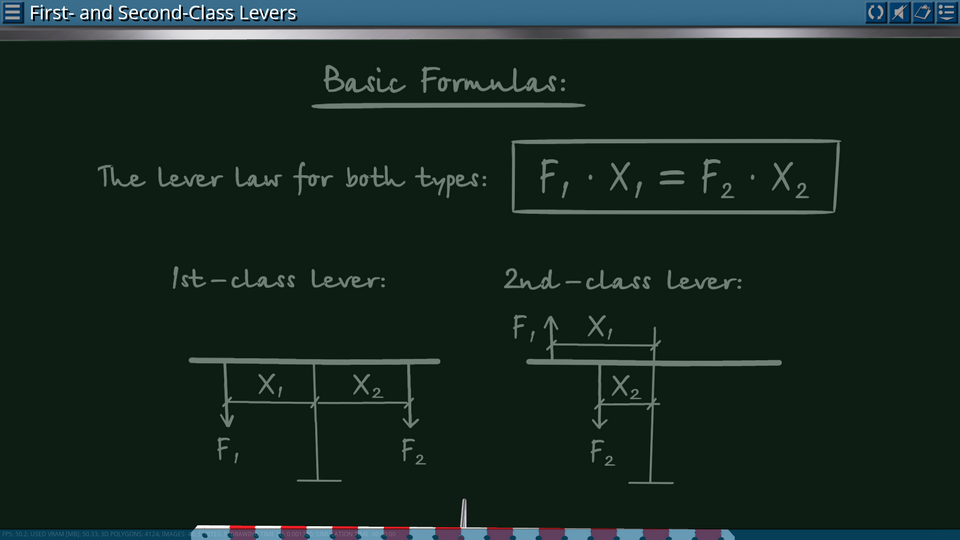
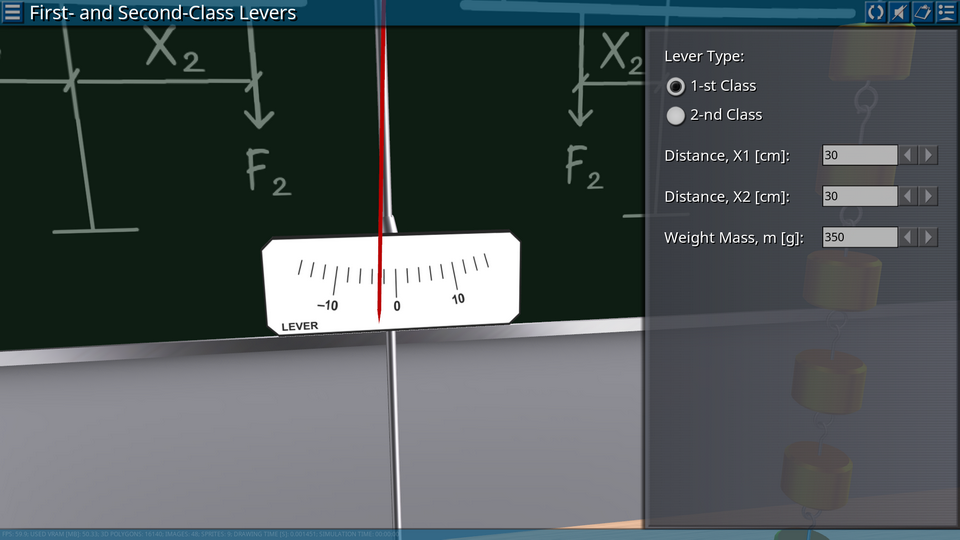
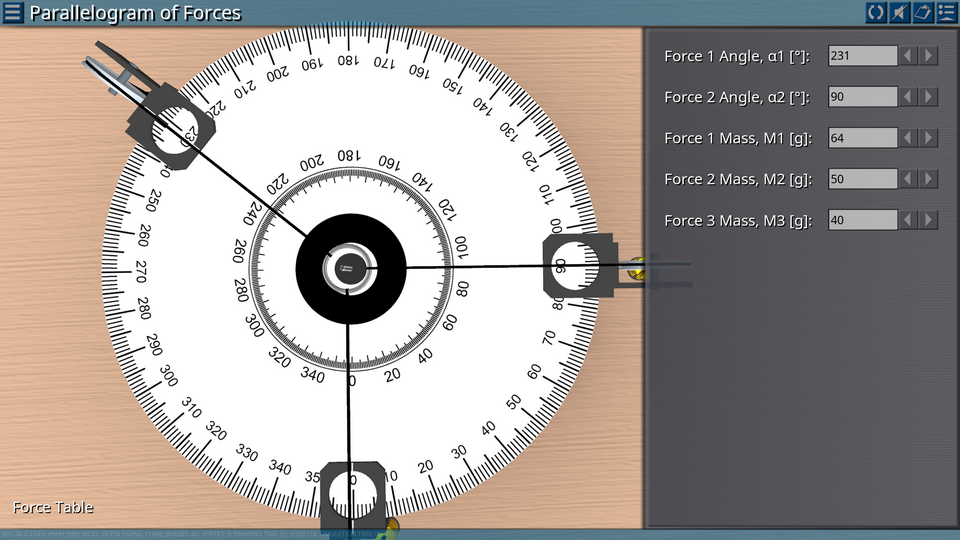
Goals: measurement of the balancing force of the lever depending on the applied weight and the distance between the weight and the point of support of the lever for two classes of levers.
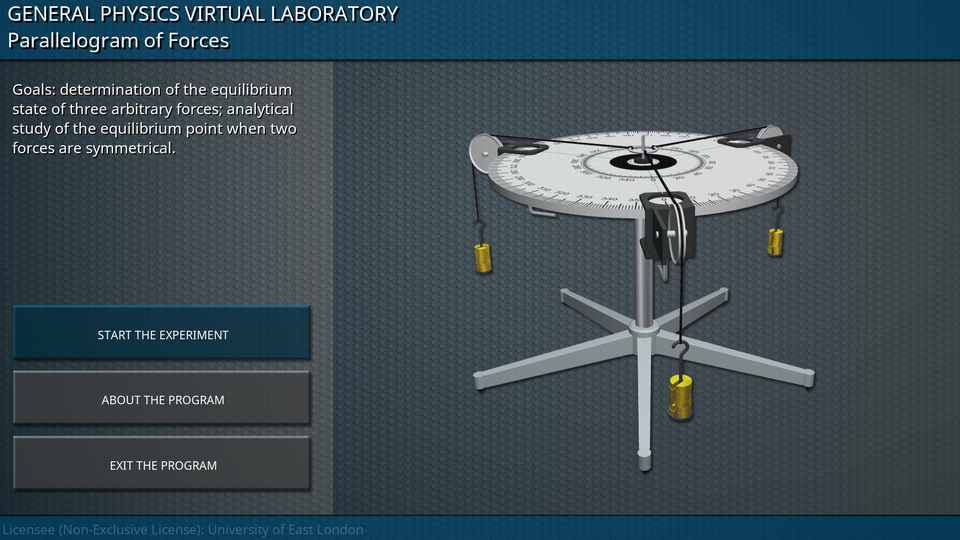
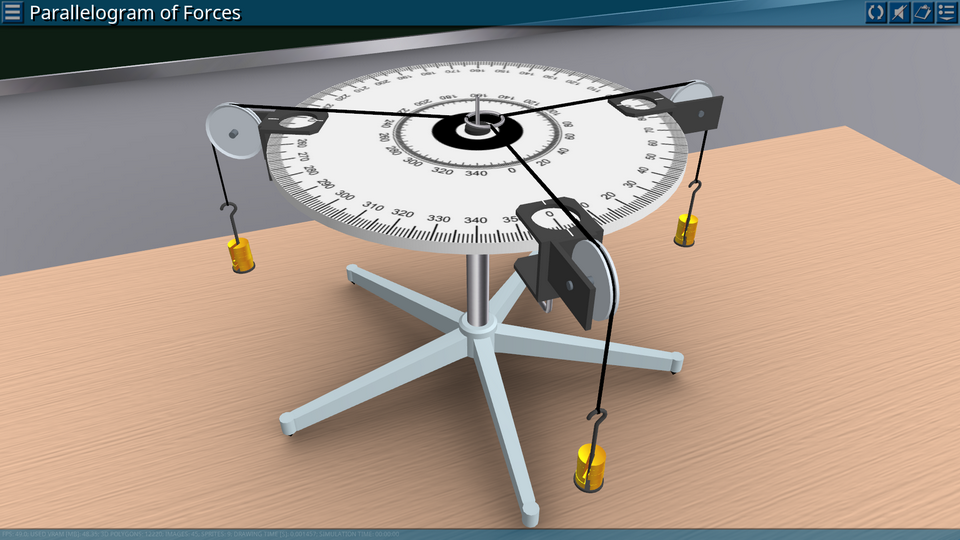
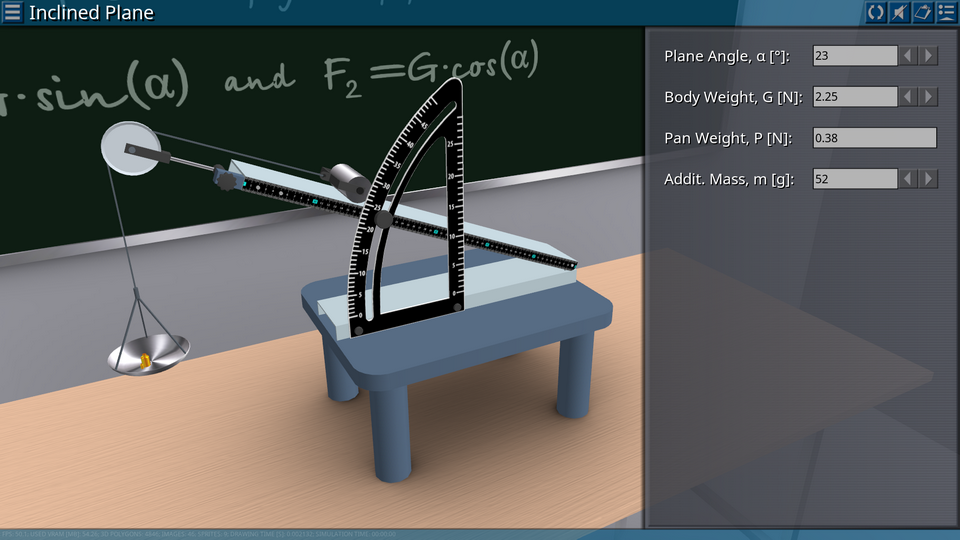
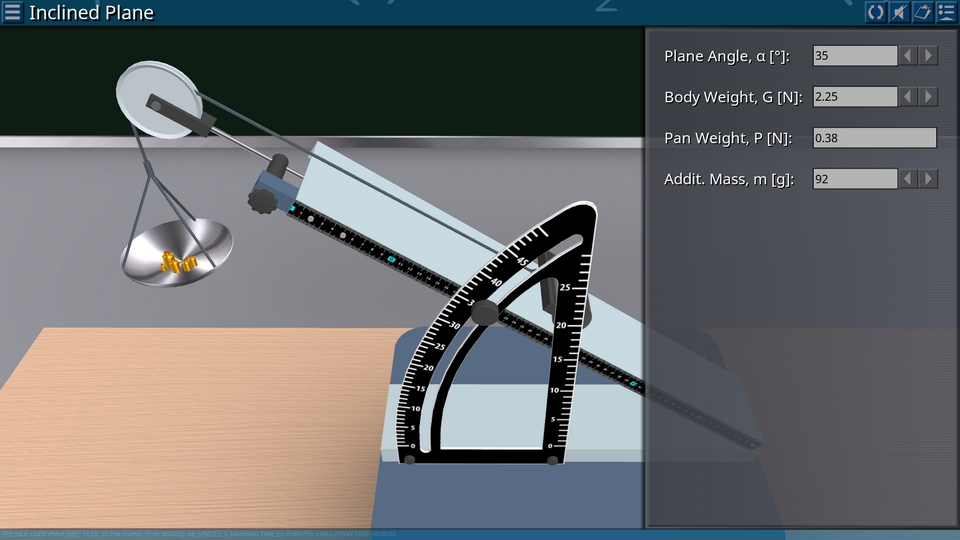
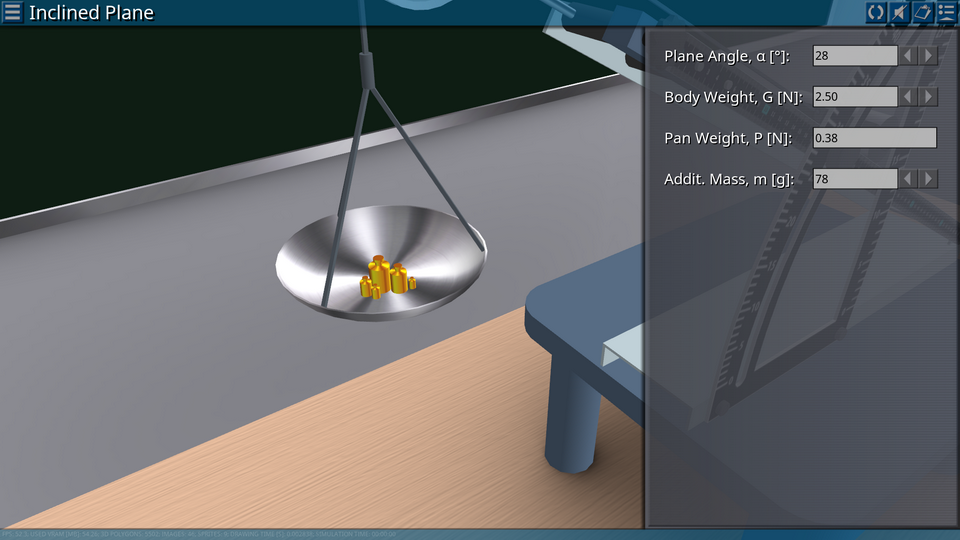
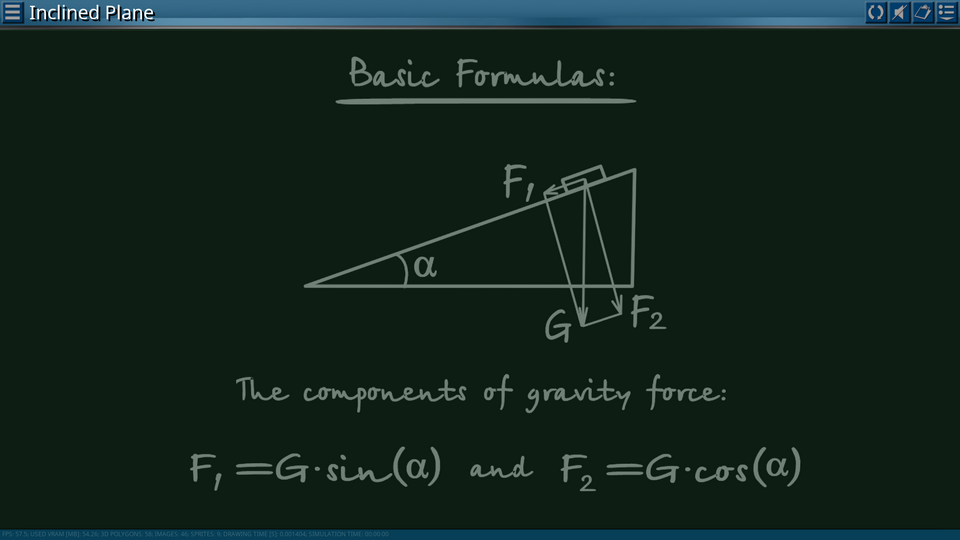
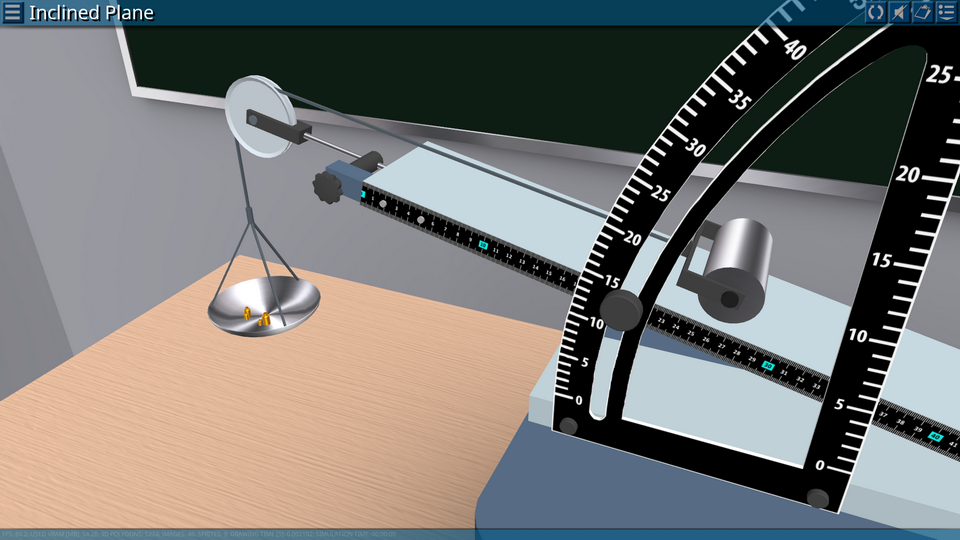
Goals: measurement of individual components of the weight of an object located on an inclined plane, depending on the angle of inclination of the plane; plotting the dependence of the ratio of the parallel component of the gravity force to the body weight on the sinus of the plane inclination angle.
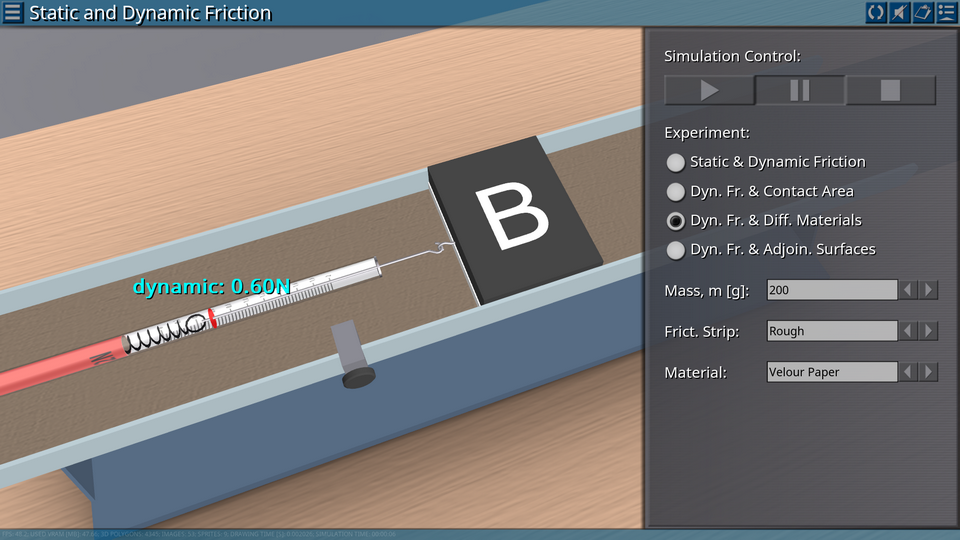
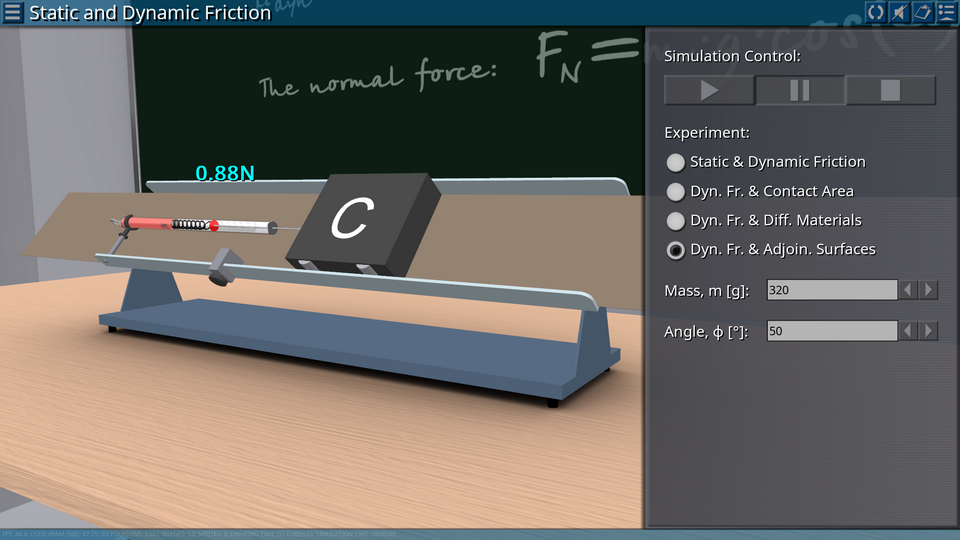
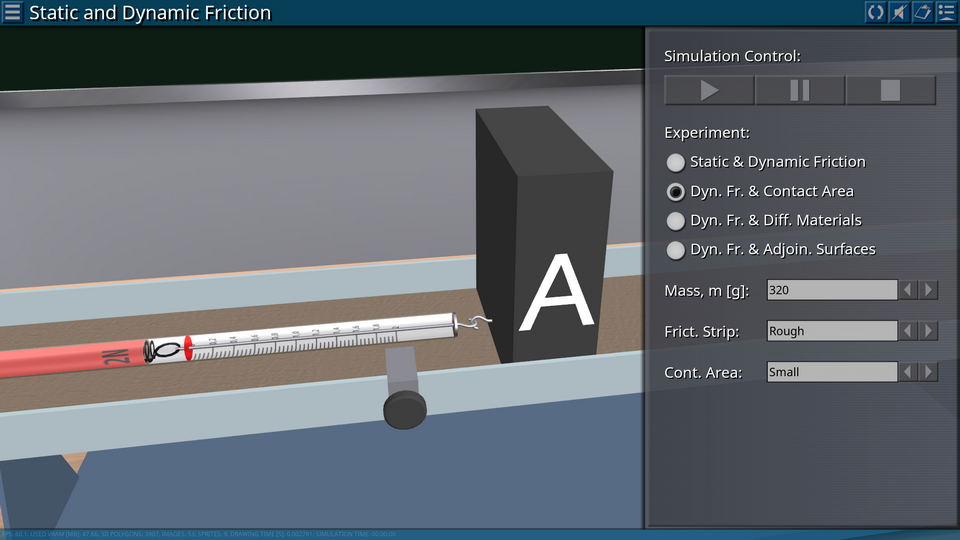
Goals: comparison of static and dynamic friction; measuring the dependence of dynamic friction on the contact area; measurement of the dependence of dynamic friction on the combination of materials; measurement of the dependence of dynamic friction on the force acting along the normal to the inclined surface.
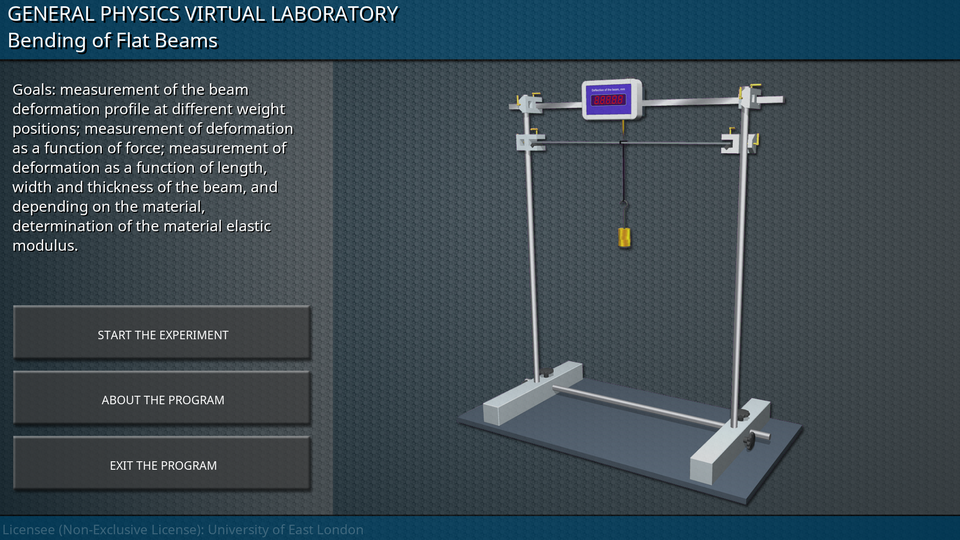
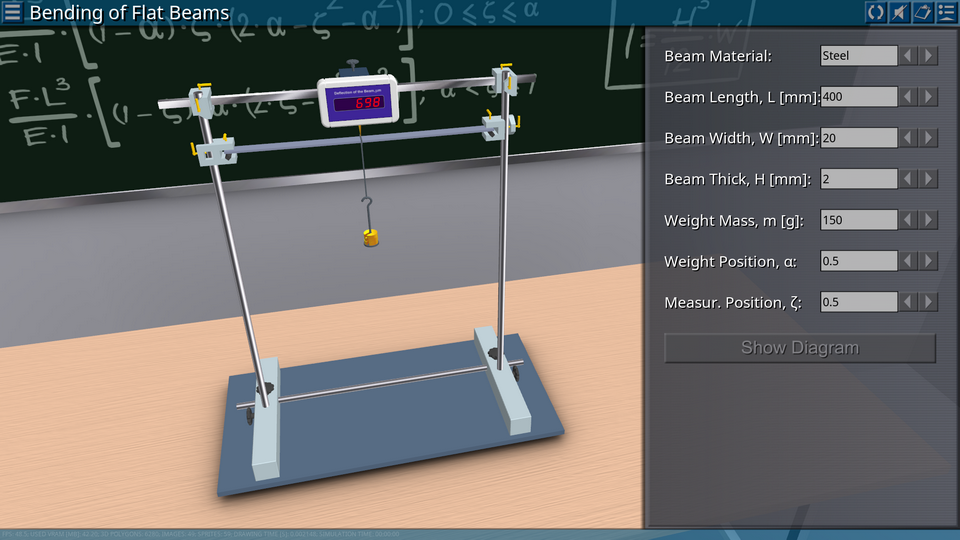
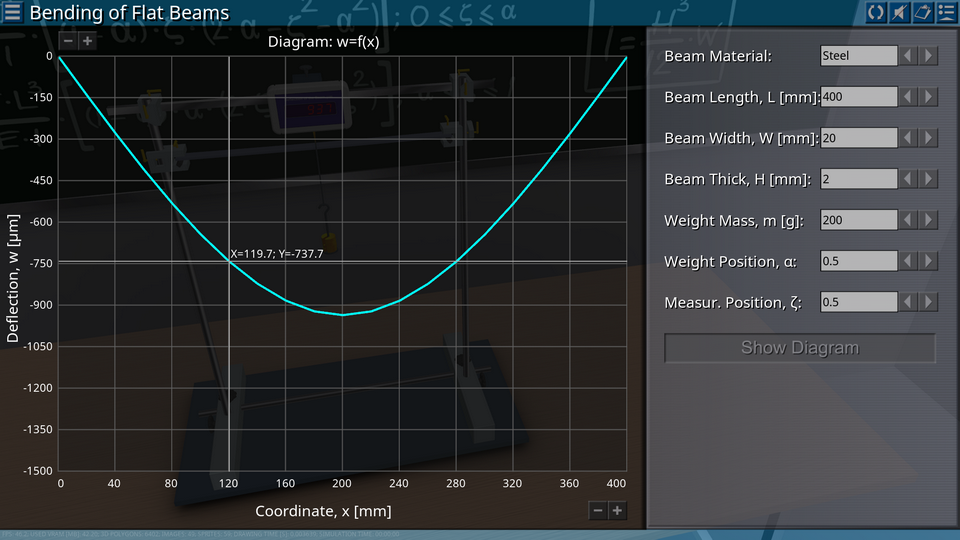
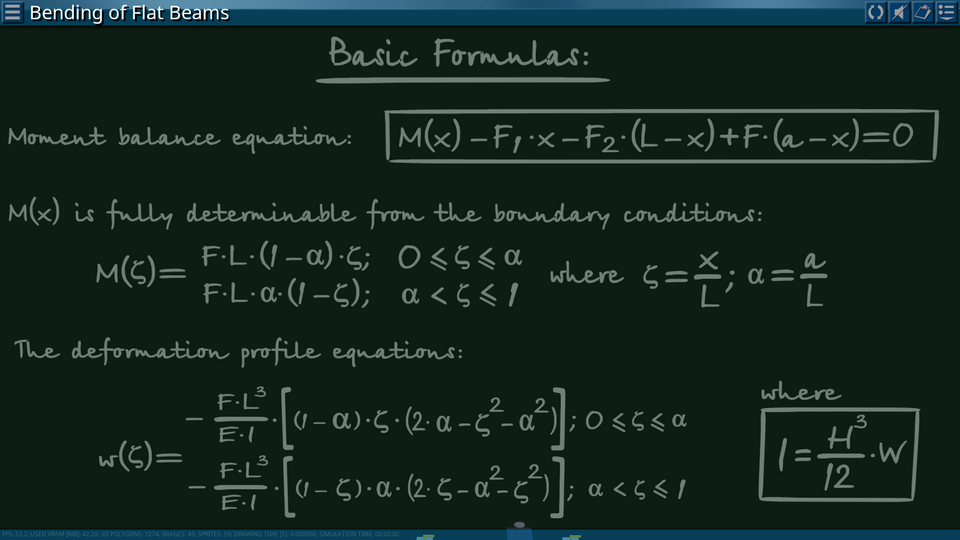
Goals: measurement of the beam deformation profile at different weight positions; measurement of deformation as a function of force; measurement of deformation as a function of length, width and thickness of the beam, and depending on the material, determination of the material elastic modulus.
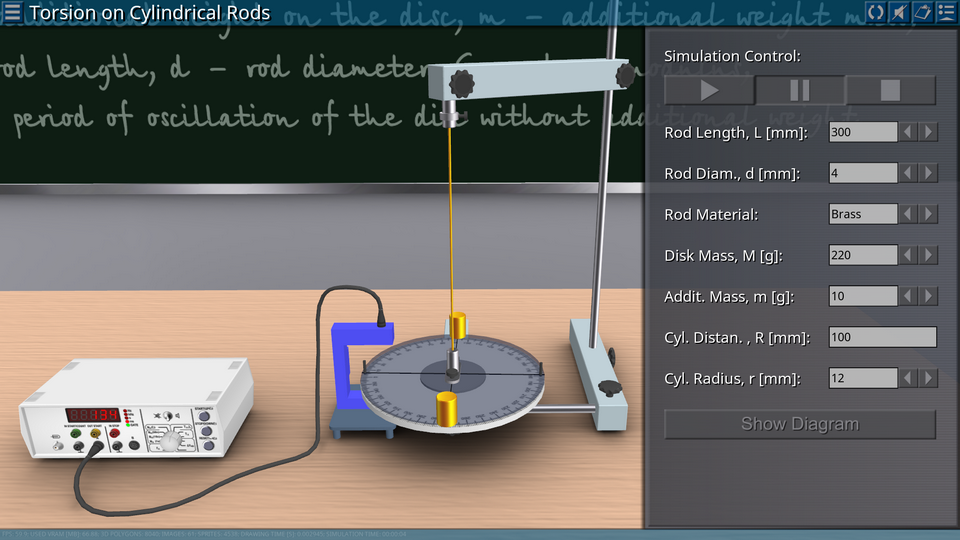
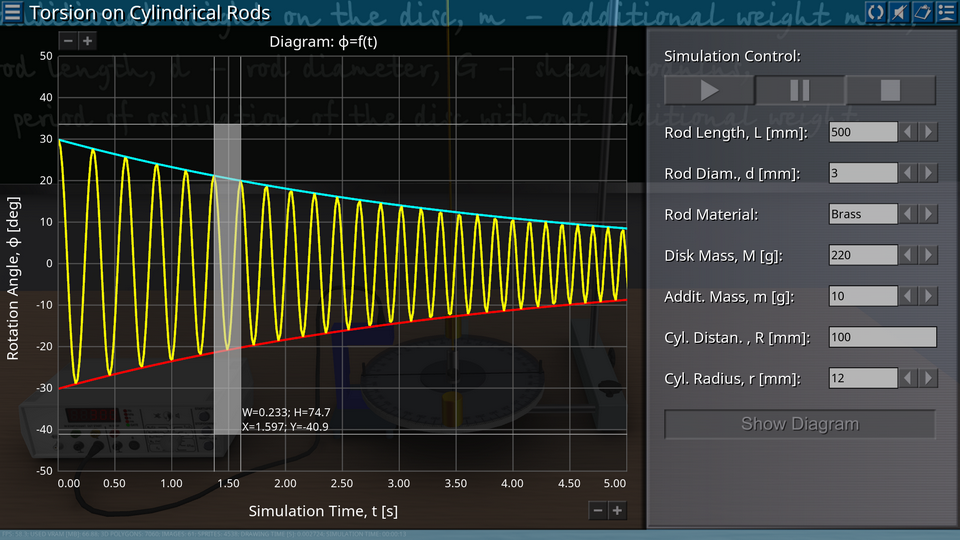
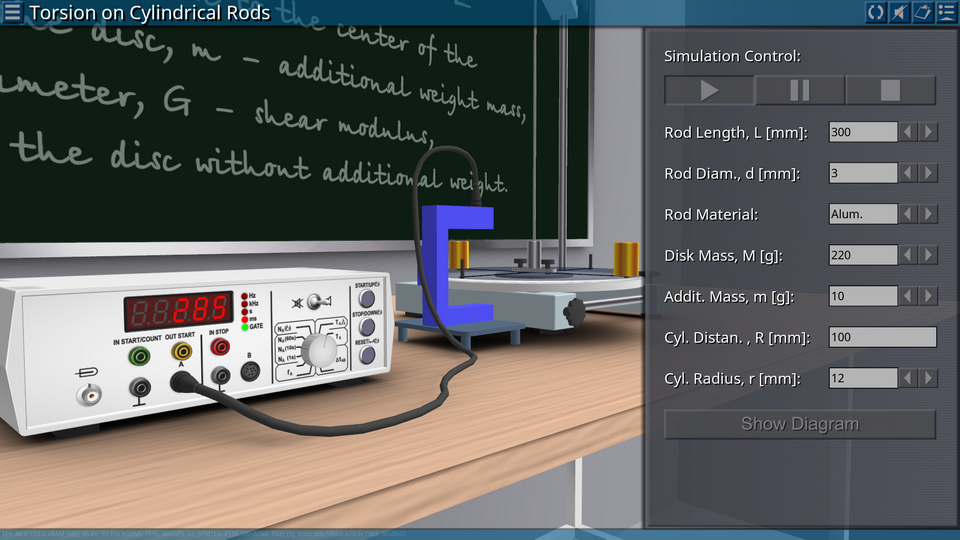
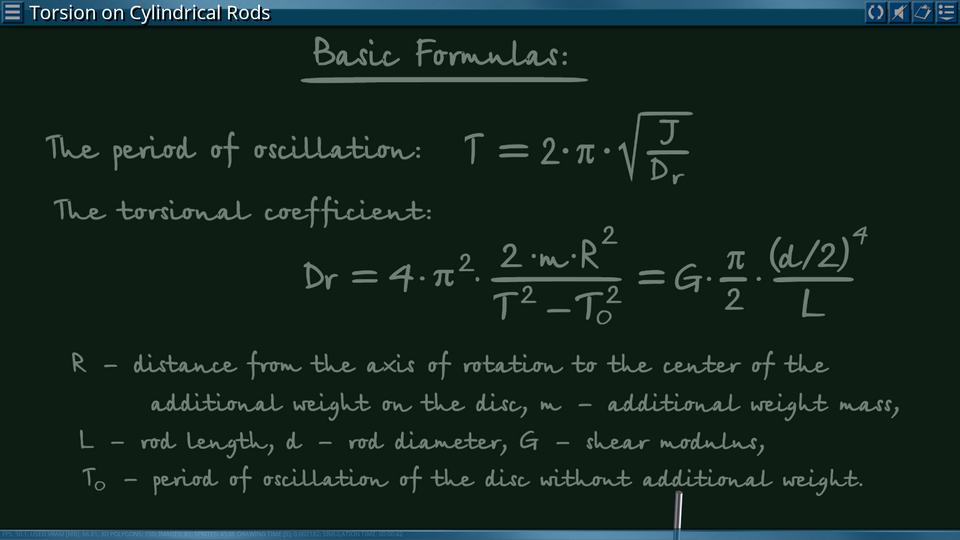
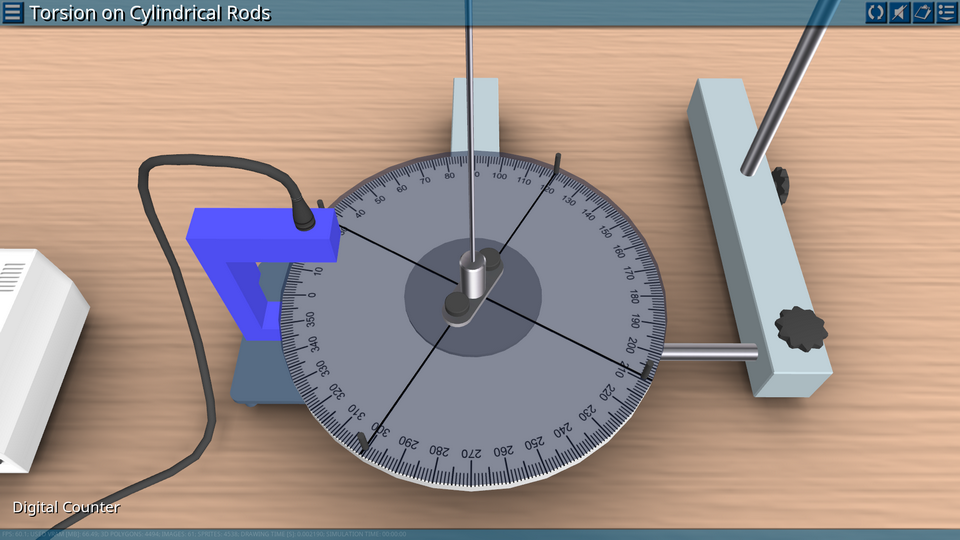
Goals: determination of the torsional coefficient of a cylindrical rod depending on its length, diameter and material; determination of the shear modulus of the rod material.
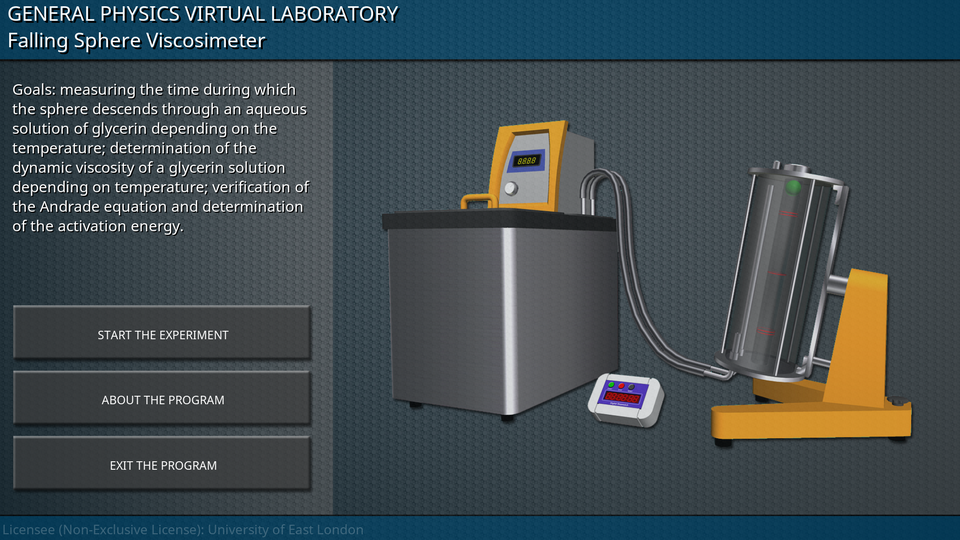
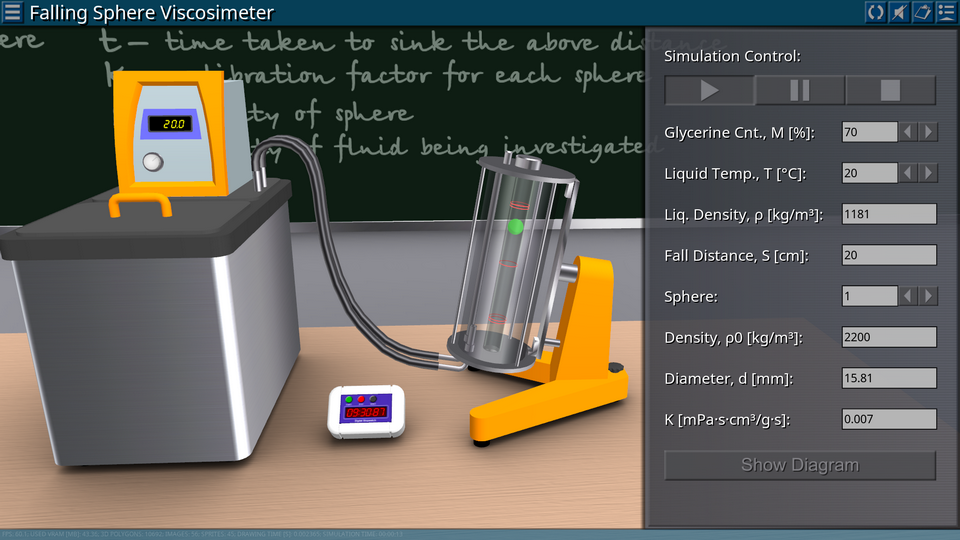
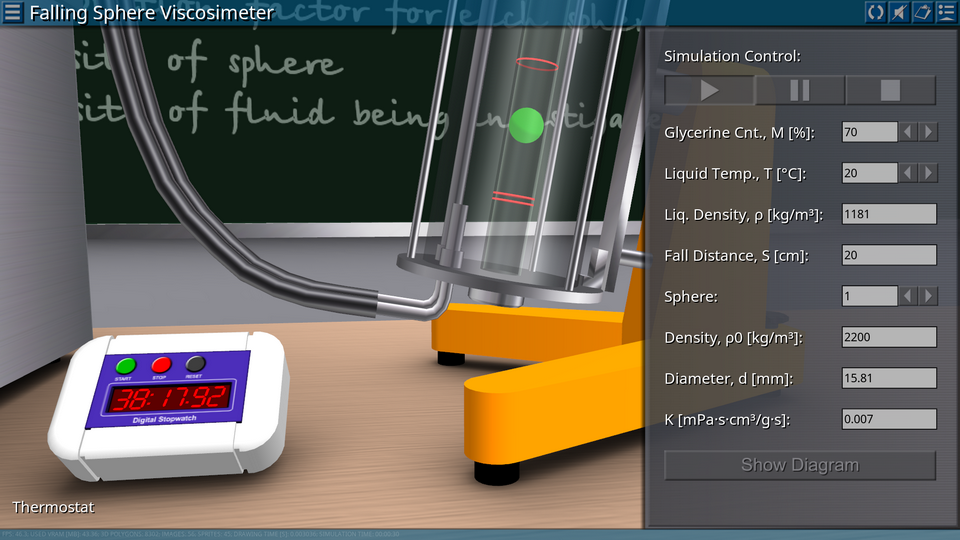
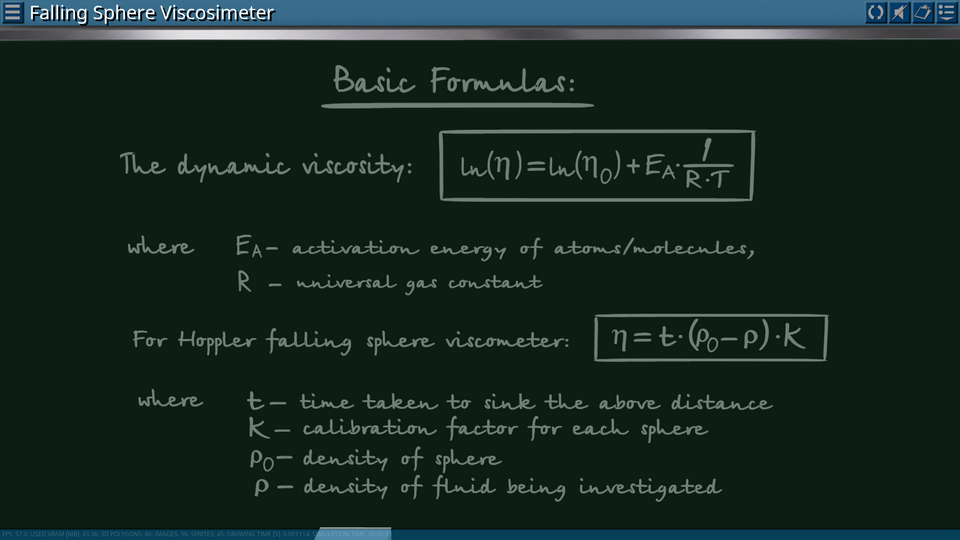
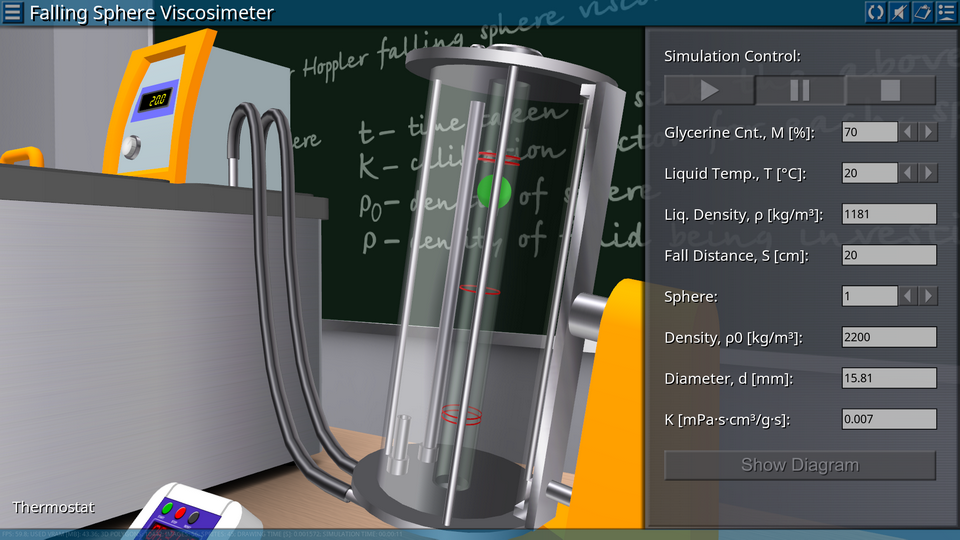
Goals: measuring the time during which the sphere descends through an aqueous solution of glycerin depending on the temperature; determination of the dynamic viscosity of a glycerin solution depending on temperature; verification of the Andrade equation and determination of the activation energy.
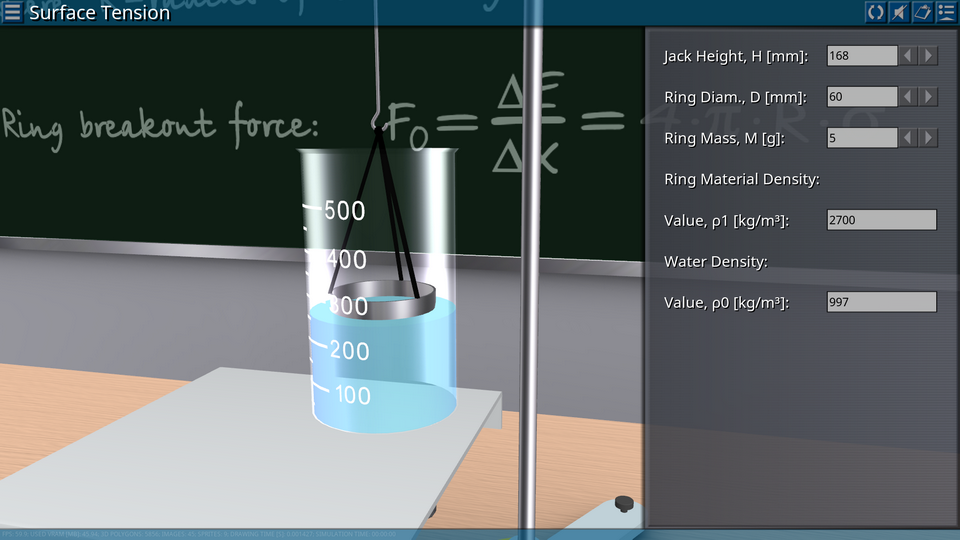
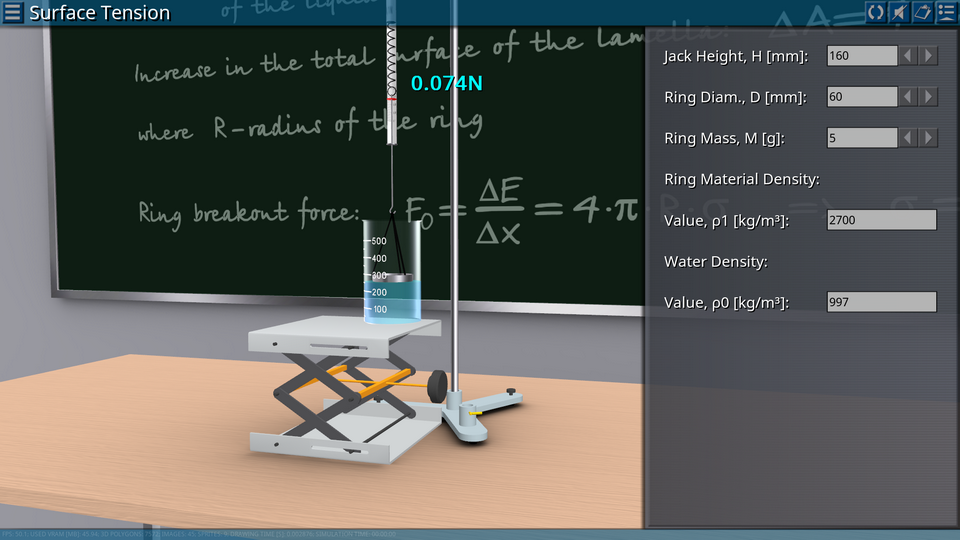
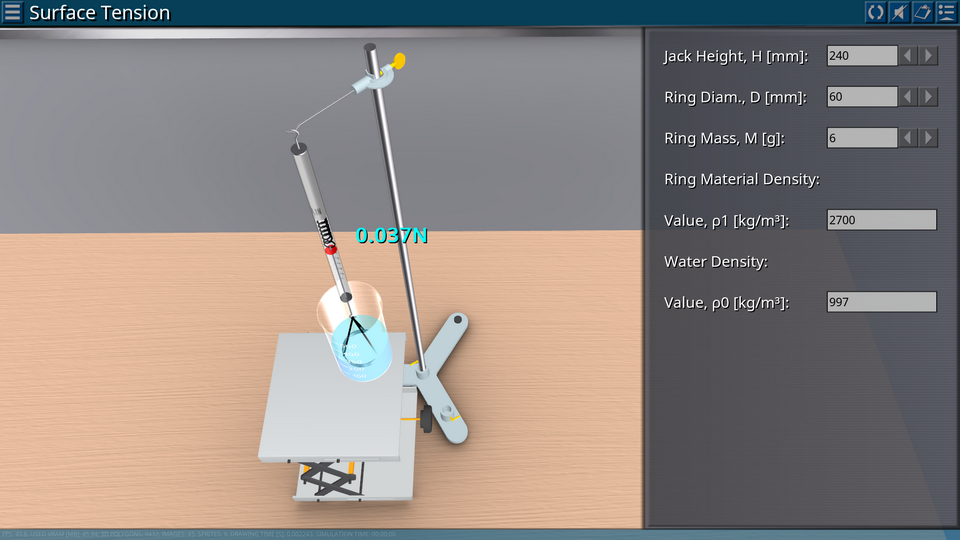
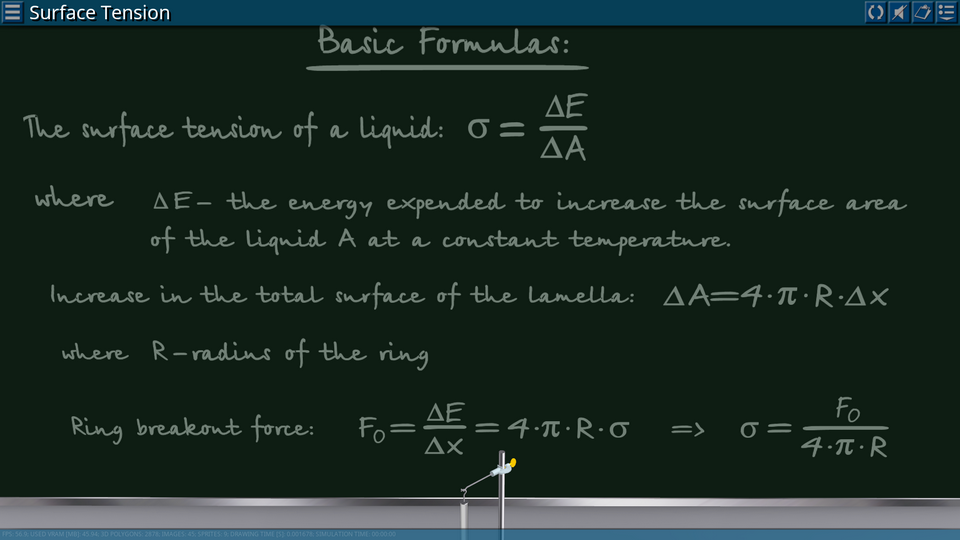
Goals: forming a liquid lamella between the sharpened ring and the surface of the liquid by slowly lifting the ring; measuring the force shortly before the ring separates from the liquid; determination of surface tension from the measured values of the breakout force.
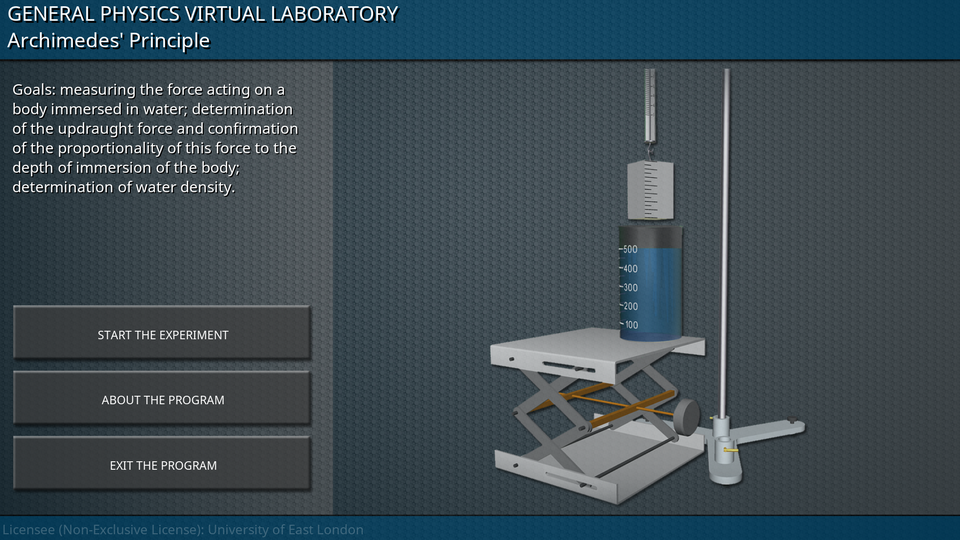
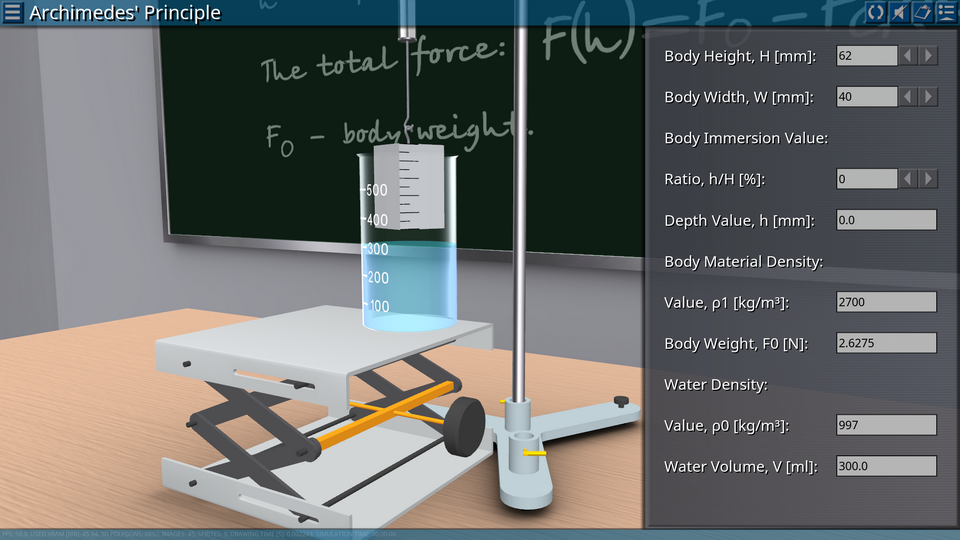
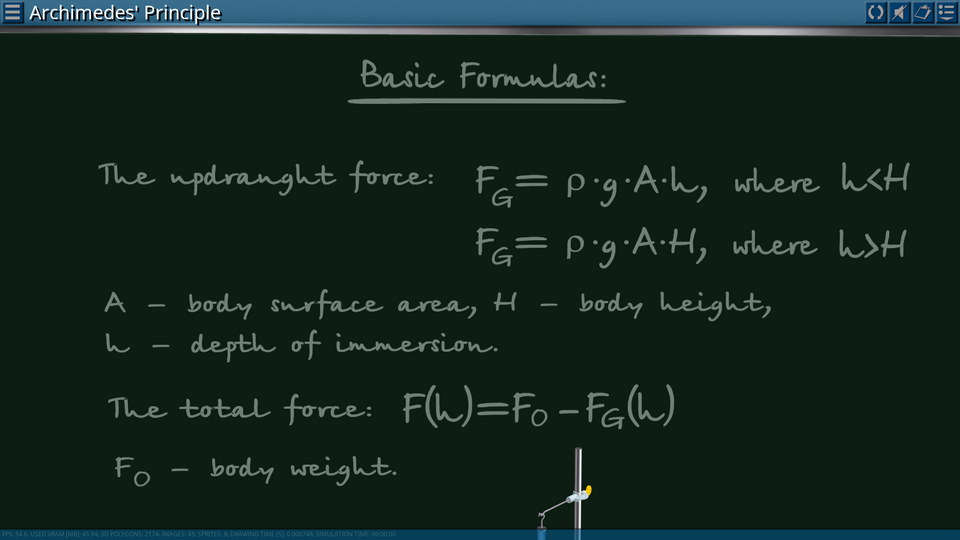
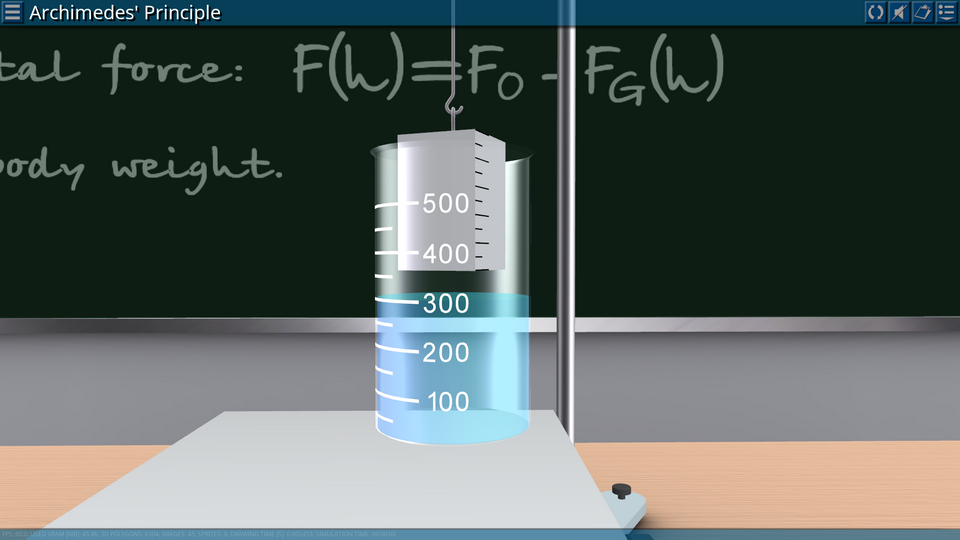
Goals: measuring the force acting on a body immersed in water; determination of the updraught force and confirmation of the proportionality of this force to the depth of immersion of the body; determination of water density.